亚拓 ALIGN 2007 FUN FLY 世界邀请赛 第一名
空中艺术体操,F3P模型飞机表演
亚拓 ALIGN 2007 FUN FLY 世界邀请赛 第一名
空中艺术体操,F3P模型飞机表演
今天收到了K牌的11.1v,2100mah,20C的电池。先上图说说第一感觉~
我手上有CL的11.1v ,2200mah,15C和Helibest的11.1v,2200mah,16C的电池。

放到一起做个对比先…

来个K牌电池的特写

称下重量 189.4g

CL的电池最重 196.9g

另外一颗CL电池,188g。CL的电池质量还是不错的,飞了三个月了,过放了几次,依然很暴。就是重些,呵呵

Helibest的最轻 172.0g
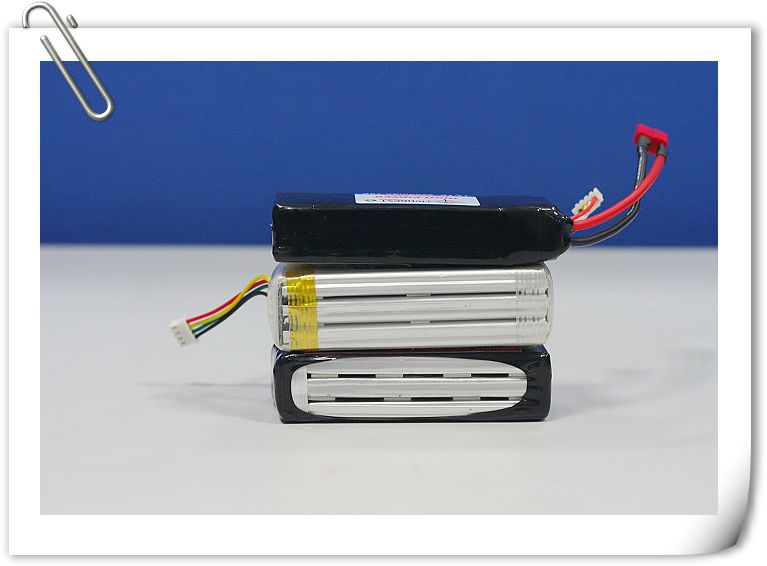
堆在一起比比厚度
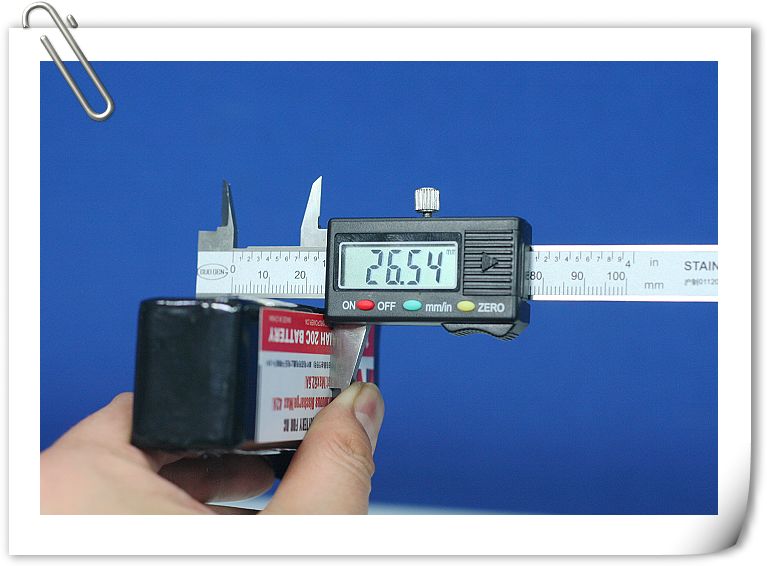
K牌电池的中间厚度为 26.54mm

CL的最厚 29.71mm

因为Helibest的电池中间没有减震垫,固最轻也最薄 21.96mm
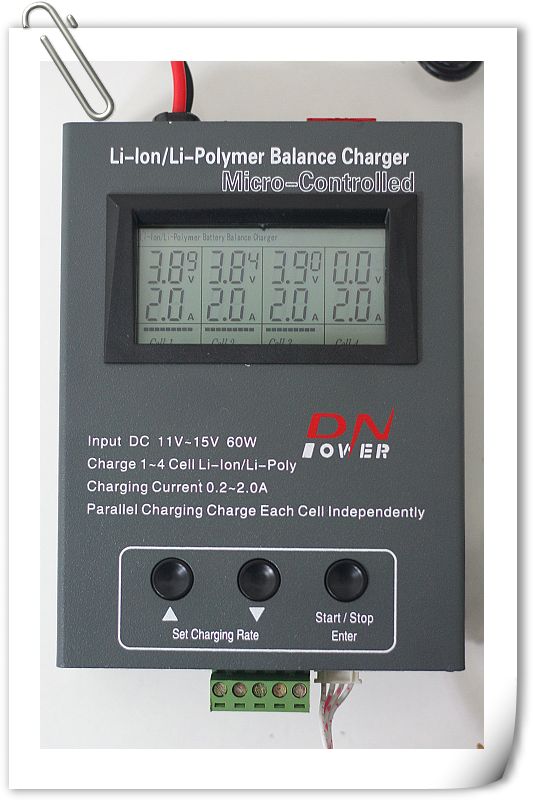
放到DN G2上,初始电压为3.89v,3.84v,3.90v
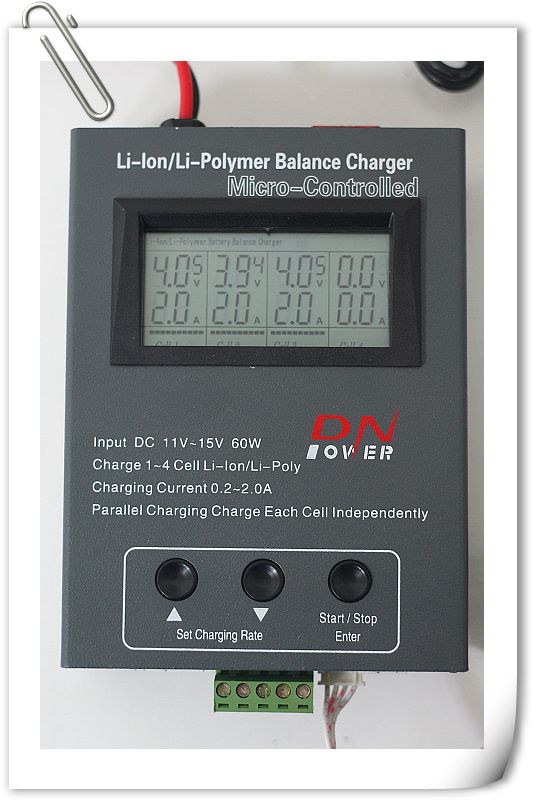
用2A的电流来充电,电压为4.05v,3.94v,4.05v
等充完电上到我的WING450上看看效果怎样…
最近换上了D591锁尾,DIY了一个发射电,可惜控的后盖就盖不上了。上个图秀一下~







刚刚看到Helibest上的这篇文章,觉得他用简单的几句话,写出了玩模型的真谛!
绝大数的我们一辈子可能都没机会开飞机,也没富有到能拥有私人飞机,而法规限制让学习飞行难上加难,当然更重要的是,只要飞就有风险。
哪个人没有飞行的梦想?小时候玩纸飞机,能不能飞、飞得漂不漂亮就要看风帮不帮忙。而手拿遥控器操纵飞机翱翔天际,即使无法真的从上空俯瞰世界,但其中乐趣一点也不比开飞机差。遥控模型,不但轻易完成了人们飞上青天的梦想,喜欢动手的人卷起袖子改装一番更能满足男人的机械瘾。
对许多遥控飞迷来说,享受翱翔天际的感动,是其它遥控模型所没有办法比拟的乐趣。玩遥控飞机其实并不难,只要天气状况许可,找个合适的场地,就能当个飞行员,快乐地飞上天际。
玩家都说:想圆小时候的飞行梦,开不到真飞机,玩遥控飞机一样过瘾!
论坛上一哥们寄给我了这个DVD。很炫啊!里面转成x264的格式,用BT共享出来。
不知道Alan是谁?看看这段视频就知道了:
http://v.youku.com/v_show/id_ce00XNTk3Mjg=.html
Ultimate Heli 3D with Alan Szabo
80分钟DVD视频/英文/无字幕
Alan Szabo在遥控直升机领域是一个如雷惯耳的名字,他拥有令人难以置信的3D直升机驾驭能力,也是无数直升机爱好者崇拜的偶像。
在这张80分钟的DVD光盘里,Alan展示了他的飞行秘诀,这些秘诀是每一位想成为3D飞行高手的人蒙昧以求的经验。如果你想进入3D特技飞行的世界,这张DVD是一定需要拥有的。其中的内容包括了引导你从基础飞行到进阶3D飞行的各阶段练习手法,视频采用双摄像机同步拍摄,在同一时间你可以看到直升机的飞行姿态和Alan操纵遥控杆的手法!
本DVD将教会你以下3D特技动作:
Snake、Tail Slide、Rainbow、Funnel、Rolling Circle、Wall、Tic-Toc、Knife Edge Drop、Death Spiral、Tumble、Hurricane、Kaos、Autorotate。



附件:alan.szabo.jr.fly.3d.zip(18663 Byte)
我的LAMA已经被我摔得不成样子了….. 不过别看摔成这个样子,我还可以很稳定的飞,嘿嘿~


玩模拟器的时候是不是觉得还要用电池实在比较浪费?想把控改为外接电的?
LAMA控的接点口是12v的,内负外正的。但是LAMA自带的这个变压器是内正外负的,所以我们第一要把这个换过来。我们需要做一根把变压器正负调换的连接线:

这个是0404的电路版:
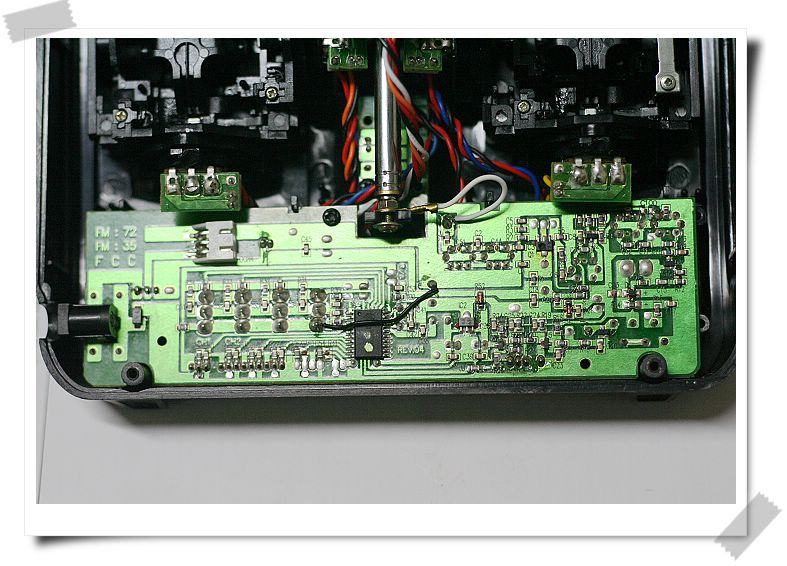
因为外接电默认只是在关控时对电池供电,开控以后还是只能由电池供电。
所以我们需要短接开关的第2、3组,见图红圈处:
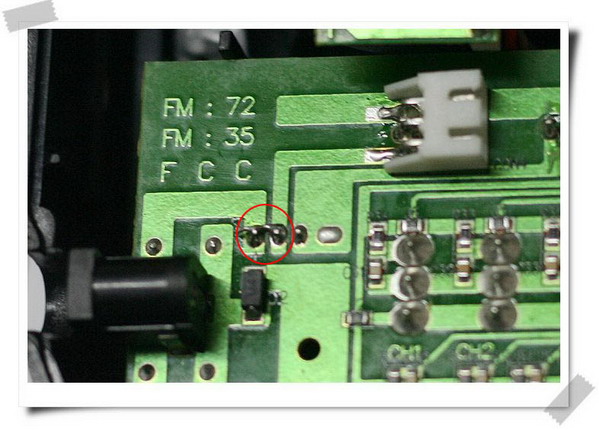
经过这样的修改,我们就可以在不装电池的情况下直接用LAMA自带的变压器给0404控供电爽飞模拟器了。
前言
陀螺仪在模型直升机上扮演着相当重要的角色,尾舵的安定与否,就全看它的表现。随着科技的进步,从机械式陀螺仪、压电式陀螺仪,一直演进到目前最流行的机头锁定(Heading Lock)压电式陀螺仪。虽然设定的方法,因品牌及型号的不同而有所差异,但其基本的观念都是一样的。所以只要观念正确,无论是使用哪一种陀螺仪,应该都可轻松上手。
㈠陀螺仪的种类
1.由构造来区分
机械式:感测器采用马达高速运转来产生陀螺效应,再利用电磁感应器来侦测偏向速度。优点是价格低廉,缺点是反应慢、准确度低、耗电、寿命短、重量大、怕振动。(例如Futaba 153 BB)
压电式:感测器采用压电晶体。优点是反应快、准确度高、耗电小、寿命长、重量轻,缺点是价格贵。但近年来价格有愈来愈低廉的趋势。温度是压电式陀螺仪的致命伤,会导致中立点偏移,所幸压电式陀螺仪内部都有温度自动修正的设计。(例如JR NEJ-900、JR NEJ-3000、Futaba G-301、Futaba G-501)
锁定式:最新式的陀螺仪。强调能使尾舵保持稳定不会偏向,没有"风标效应"(Weathercock Effect)。适合3D花式特技使用,但却不适合F3C的飞行动作。(例如JR 550T、JR 5000T、Futaba GY-501、CSM 360、CSM 540)
2.由感度来区分
单段式:只能设定一种感度,由控制盒上的旋纽来调整感度值。优点是价格低廉,缺点是只有一种感度、无法同时适合静态飞行及上空飞行。(例如JR G-400、GWS PG-01、CSM 180)
二段式:能设定二种感度,您的遥控器必须具备切换感度的功能。依调整感度值的方式不同,又可分为以下二种。
由控制盒上的旋纽来调整感度值。H(high)旋纽控制高感度值,L(low)旋纽控制低感度值。(例如Futaba G-501)
控制盒无调整感度的旋纽,必须由遥控器来调整感度值,所以您的遥控器必须具备设定感度的功能。(例如JR G-450、JR NEJ-900、JR NEJ-3000)
机械式陀螺仪目前看来已到了日暮西山的地步,若您正准备买陀螺仪,劝您买压电式的,而且要买二段式感度的陀螺仪。单段式感度的陀螺仪,除了能练练停悬以外,好像没有多大的用处。高级压电式陀螺仪因为反应快,所以要配合高速伺服机(如JR 2700G、8700G,Futaba 9203、9205)才能发挥最佳效能。
以下的安装及设定步骤,是以二段式感度的陀螺仪(非锁定式)为范例。
㈡安装
将陀螺仪用双面胶贴在机体预留的陀螺仪座,或振动较小的地方。有人说将陀螺仪安装在离主轴愈近的位置愈好,这个观念其实并不很正确,因为陀螺仪只会侦测机体自转的角速度,所以不论将陀螺仪安装在机体的任何位置,所侦测到的角速度都是一样的。反倒是一般说来离主轴较近的地方,振动会比较小。
将陀螺仪的Rx Rud接在接收机的尾舵插座,Rx Aux接在控制感度的频道插座(依遥控器厂牌及型号而有不同,请叁阅您的遥控器说明书),将尾舵伺服机接在陀螺仪的Sv Rud插座。
若您的遥控器具备调整感度的功能,请将陀螺仪控制盒上的H旋纽调到100%的位置,L旋纽调到0%的位置。否则请将H旋纽调到70%的位置,L旋纽调到50%的位置。
㈢设定
打开遥控器的电源开关,将尾舵ATV设为140~150%,设定尾舵大小动作比例(Dual Rate),静态飞行为70%,上空飞行为100%。尾舵微调及上下跟轴归零。
打开接收机的电源开关。
检查尾舵伺服机的正逆转方向。将尾舵摇杆打右舵,尾舵伺服机的摆臂应朝机头的方向摆动。若伺服机转动的方向错误,请由遥控器设定尾舵伺服机的正逆转方向。
检查陀螺仪的正逆转方向。抬起直升机将机头往左摆动,此时尾舵伺服机的摆臂应朝机头的方向摆动。若伺服机转动的方向错误,请切换陀螺仪控制盒上的正逆转开关。
检查尾舵伺服机的摆臂长度,先叁考陀螺仪说明书内的建议长度,一般在15 左右。高级的陀螺仪有限制尾舵伺服机行程量的旋纽,可分别调整尾舵伺服机左右方向的最大行程量。若尾舵ATV设为140~150%,会超出尾旋翼螺距滑套的活动范围,不用担心,因为陀螺仪会抑制遥控器所发出的尾舵指令,虽然在地面测试时会超出尾旋翼螺距滑套的活动范围,但在实际飞行时,除非将陀螺仪的感度调到很小很小,否则是不会超过的。
检查遥控器的感度切换开关,确定飞行模式Normal是高感度,飞行模式Idle-up 1及Idle-up 2是低感度。
若您使用的遥控器具备调整感度的功能,请将高感度设为70%,低感度设为50%。
㈣试飞及调整
发动引擎,将直升机起飞并且保持在停悬的位置。
调整油门曲线及螺距曲线,使停悬时油门摇杆正好在50%的位置。
若停悬时机头会偏左,则调短尾舵连杆的长度,若机头会偏右,则调长尾舵连杆的长度。
先将直升机保持在停悬的位置,并且确认尾舵不会偏向任何一方,然後加油门使直升机垂直爬升,若爬升的过程中机头会偏左,则增加"上跟轴"的数值,若机头会偏右,则减少"上跟轴"的数值。反覆地测试,直到爬升的过程中机头不会偏向任何一方。
先将直升机停悬在安全的高度,并且确认尾舵不会偏向任何一方,然後收油门使直升机垂直下降,若下降的过程中机头会偏右,则增加"下跟轴"的数值,若机头会偏左,则减少"下跟轴"的数值。反覆地测试,直到下降的过程中机头不会偏向任何一方。
将飞行模式切到Idle-up 1,油门全开作高速直线飞行,调整Idle-up 1的"上跟轴"数值,直到机头不会偏向任何一方。
作内筋斗或540°失速倒转,调整"下跟轴"的数值,直到机头不会偏向任何一方。
㈤重点提示
在不会产生追踪现象的前提下,要尽可能将陀螺仪的感度调大,静态飞行时的感度约为70~90%,上空飞行时的感度约为50~70%。若低於此感度范围即有追踪现象,则调短尾舵伺服机的摆臂长度。若高於此感度范围仍无追踪现象,则加大尾舵伺服机的摆臂长度。
尾舵的行程量(ATV)要设为140~150%,若觉得机体旋转速度过快,则降低尾舵大小动作比例(Dual Rate),直到符合您的需求。请勿用增加或减少感度的方式来调整机体的旋转速度。
若使用反应速度较慢的尾舵伺服机,可能比较容易产生追踪现象。
前言
直升机的曲线调整可分为油门曲线及螺距曲线,二者相辅相成,密不可分。每种飞行模式都有其独特的曲线,影响曲线的主要因素有:机种、级数、主旋翼翼形、天候状况及个人的飞行习惯。一般的八动遥控器对于油门及螺距曲线都提供 5个控制点,分别对应0%(L)、25%(1)、50%(2)、75%(3)及100%(H)。以下列出的数值仅供参考,您必须依照实际的需要作调整。
NORMAL
适用于停悬及静态飞行,重点是要使机体沉稳柔顺。调整时先决定停悬点(油门摇杆在1/2的位置)的螺距及主旋翼转速,转速的快慢依您自己的习惯而定。若您的经验未能以目视的方式来判断转速,可以请有经验的同好在旁协助,或购买一种可安装在尾管上的转速计。
1.调整停悬点:螺距约在+6°,主旋翼转速约在1,400RPM。
若停悬时油门摇杆低于1/2的位置:请降低油门或螺距曲线第2点的数值。
若停悬时油门摇杆高于1/2的位置:请增加油门或螺距曲线第2点的数值。
若停悬时主旋翼转速过快:请降低油门曲线第2点的数值,并且增加螺距曲线第2点的数值。
若停悬时主旋翼转速过慢:请增加油门曲线第2点的数值,并且降低螺距曲线第2点的数值。
2.调整最高点:螺距约在+10°。
先保持停悬的状况,然后把油门摇杆推到最高点。
若机体上升快速但主旋翼转速变慢:高速螺距过大,请降低螺距曲线H点的数值。
若机体上升缓慢且主旋翼转速变快:高速螺距过小,请增加螺距曲线H点的数值。
调整至机体上升速度适中,且主旋翼转速变化不大即可。
3.调整最低点:螺距约在-2°。
先将直升机保持停悬在适当的高度,然后把油门摇杆拉到最低点。
若机体下降速度过快:负螺距过大,请增加螺距曲线L点的数值。
若机体下降速度缓慢:负螺距过小,请降低螺距曲线L点的数值。
调整至机体下降速度适中即可。
4.调整1/4及3/4点
作静态动作时,油门摇杆几乎只在¼至¾处移动,所以油门及螺距曲线在此范围内仅作小幅度的变化,使得机体不会暴起暴落。建议您将副翼、升降舵及尾舵的大小动作比例(DUAL RATE)设为70%,并适度地搭配指数曲线功能(EXP),可使动作更为轻柔精准。
IDLE-UP 2
适用于3D花式飞行,重点是要使机体静若处子、动如脱兔。调整时主旋翼转速一定要快,约在1,700RPM。转速快的优点是停悬稳定、翻滚快速。但相对地转速快也会产生较大的振动,所以机体结构一定要详加检查,确认各部位螺丝已锁紧。
•调整正飞停悬点:螺距约在+5°。
若停悬时油门摇杆低于3/4的位置:请降低油门或螺距曲线第3点的数值。
若停悬时油门摇杆高于3/4的位置:请增加油门或螺距曲线第3点的数值。
若停悬时主旋翼转速过快:请降低油门曲线第3点的数值,并且增加螺距曲线第3点的数值。
若停悬时主旋翼转速过慢:请增加油门曲线第3点的数值,并且降低螺距曲线第3点的数值。
•调整最高点:螺距约在+9°。
先保持正飞停悬的状况,然后把油门摇杆推到最高点。
若机体上升快速但主旋翼转速变慢:高速螺距过大,请降低螺距曲线H点的数值。
若机体上升缓慢且主旋翼转速变快:高速螺距过小,请增加螺距曲线H点的数值。
调整至机体上升速度适中,且主旋翼转速变化不大即可。
•调整倒飞停悬点:螺距约在-5°。
若停悬时油门摇杆低于1/4的位置:请增加油门曲线或降低螺距曲线第1点的数值。
若停悬时油门摇杆高于1/4的位置:请降低油门曲线或增加螺距曲线第1点的数值。
若停悬时主旋翼转速过快:请降低油门曲线及螺距曲线第1点的数值。
若停悬时主旋翼转速过慢:请增加油门曲线及螺距曲线第1点的数值。
•调整最低点:螺距约在-9°。
先保持倒飞停悬的状况,然后把油门摇杆拉到最低点。
若机体上升快速但主旋翼转速变慢:负速螺距过大,请增加螺距曲线L点的数值。
若机体上升缓慢且主旋翼转速变快:负速螺距过小,请降低螺距曲线L点的数值。
调整至机体上升速度适中,且主旋翼转速变化不大即可。
油门锁定
油门锁定是为了执行熄火降落的动作,所以没有油门曲线只有螺距曲线。
1.调整最低点:螺距约在-4°。
先保持上空飞行的状态,把油门摇杆拉到最低点,随即将油门锁定开关切到ON的位置。
若机体下降速度过快:负速螺距过大,请增加螺距曲线L点的数值。
若机体下降速度缓慢:负速螺距过小,请降低螺距曲线L点的数值。
调整至机体下降速度适中,且主旋翼转速不会急遽减慢即可。
2.调整中立点:螺距约在+5°。
当机体降至离地3米高左右,把油门摇杆由最低点稳定地推向中立点。
若机体下降速度过快:中速速螺距过小,请增加螺距曲线第2点的数值。
若机体急速停止下降:中速速螺距过大,请降低螺距曲线第2点的数值。
调整至机体能缓慢且持续的下降即可。
3.调整最高点:螺距约在+12°。
最高点其实应该用不到,正常的熄火降落动作,在油门摇杆推至3/4位置前,已经安全降落了。
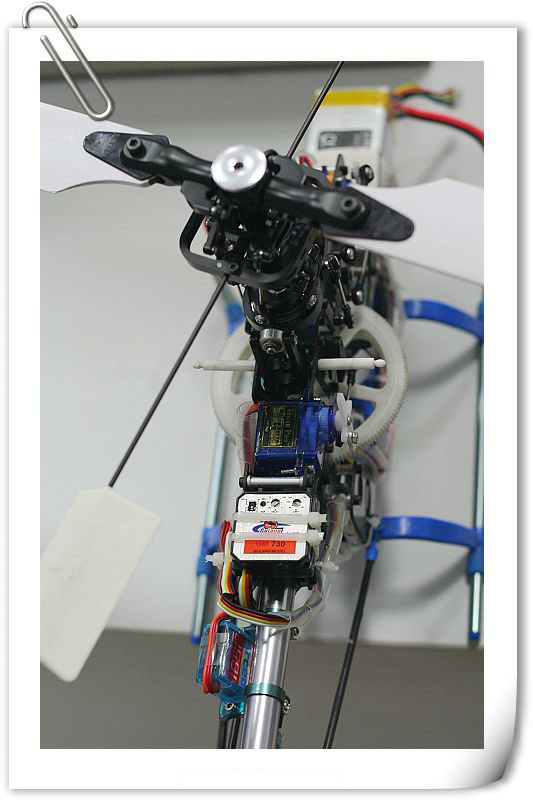
最近是玩电直玩疯了,呵呵~ 又搞了一架WING450,标准的450级的电直。上照片秀一下….
目前正在装配中,还没上天~

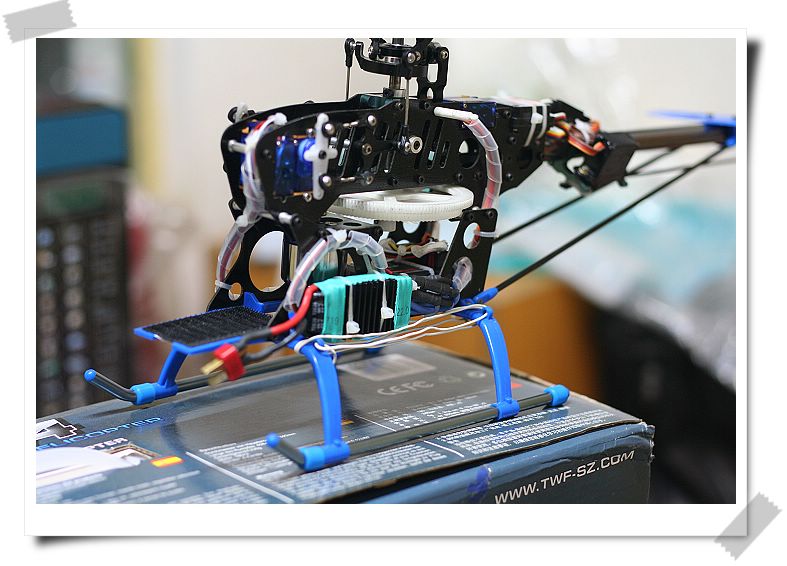

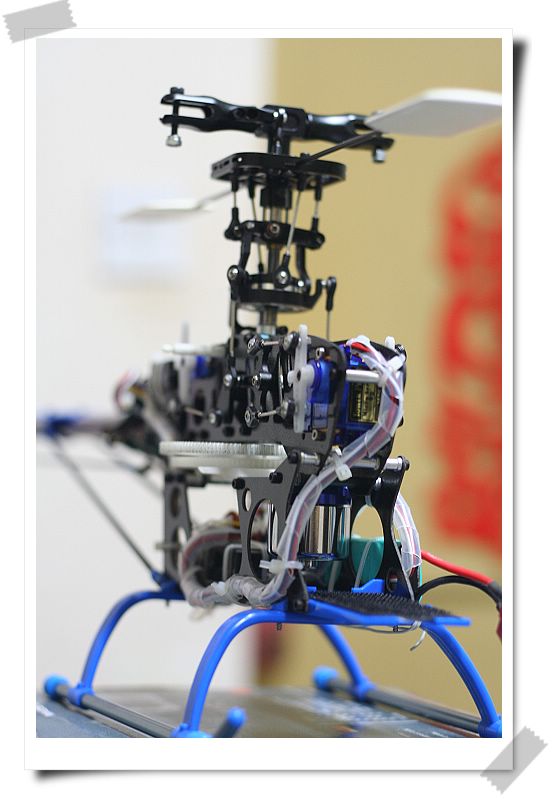
装配好以后应当是这个样子…. 嘿嘿






|
WING450电动遥控直升机
细化特性
|
|||